

 QQ
QQ
主电源、计算机供电单元、计算机控制模块(计算机主体)、输入/输出板、Customer connections(用户连接端口)、FlexPendant接口(示教盒接线端)、轴计算机板、驱动单元(机器人本体、外部轴)。
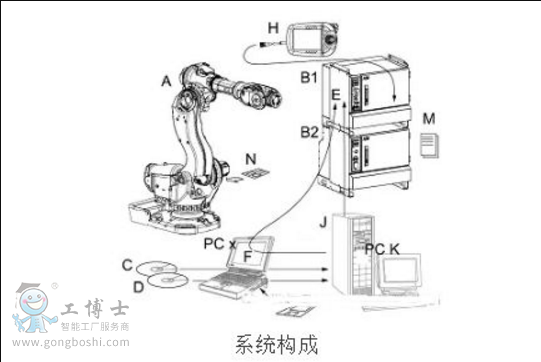
B1 ABB机器人IRC5 Control Module,包含机器人系统的控制电子装置。
B2 ABB机器人IRC5 Drive Module,包含机器人系统的电源电子装置。在 Single Cabinet Controller 中, Drive Module 包含在单机柜中。MultiMove 系统中有多个 Drive Module。
C RobotWare 光盘包含的所有机器人软件
D 说明文档光盘。
E 由机器人控制器运行的机器人系统软件。
F RobotStudio Online 计算机软件(安装于 PC x 上)。RobotStudioOnline 用于将 RobotWare 软件载入服务器,以及配置机器人系统并将整个机器人系统载入机器人控制器。
G 带 Absolute Accuracy 选项的系统专用校准数据磁盘。不带此选项的系统所用的校准数据通常随串行测量电路板 (SMB) 提供。
H 与控制器连接的 FlexPendant,
J 网络服务器(不随产品提供)。 可用于手动储存:
RobotWare ?成套机器人系统 ?说明文档
在此情况下,服务器可视为某台计算机使用的存储单元,甚至计算机本身!
如果服务器与控制器之间无法传输数据,则可能是服务器已经断开!
PC K 服务器的用途:
使用计算机和 RobotStudio Online 可手动存取所有的 RobotWare 软件。
手动储存通过便携式计算机创建的全部配置系统文件。
手动存储由便携式计算机和 RobotStudio Online安装的所有机器人说明文档。
在此情况下,服务器可视为由便携式计算机使用的存储单元。
M RobotWare 许可密钥。 原始密钥字符串印于 Drive Module 内附纸片上(对于 Dual Controller,其中一个密钥用于 Control Module,另一个用于 Drive Module;而在MultiMove 系统中,每个模块都有一个密钥)。RobotWare 许可密钥在出厂时安装,从而无需额外的操作来运行系统。
N 处理分解器数据和存储校准数据的串行测量电路板(SMB)。 对于不带Absolute Accuracy 选项的系统,出厂时校准数据存储在 SMB 上。PC x 计算机(不随产品提供)可能就是上图所示的服务器J!如果服务器与控制器之间无法传输数据,则可能是计算机已经断开连接!
ABB机器人IRC5示教盒按钮功能介绍:
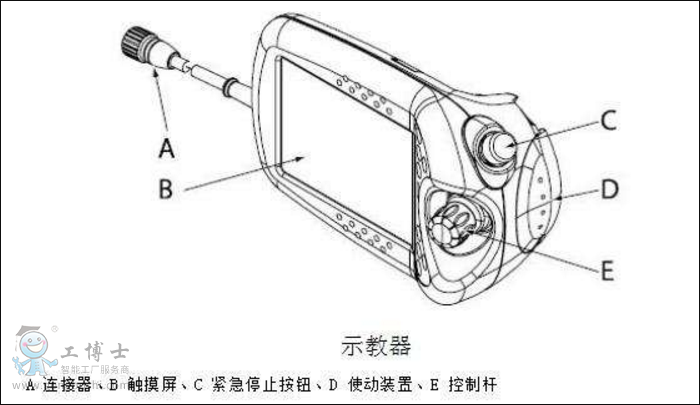
A 连接器、B 触摸屏、C 紧急停止按钮、D 使动装置、E 控制杆
- 下一篇:ABB机器人:系统的集成应用
- 上一篇:ABB机器人: 让智能喷涂成为可能
