1. 现场希望获取机器人运行的距离,如何实现?比如写屏如下
important; overflow-wrap: break-word !important;">
important; overflow-wrap: break-word !important;">2. 可以创建若干例行程序来实现,通过定时获取当前位置(0.1s一次),计算两次位置之间的距离并求和获取总距离
important; overflow-wrap: break-word !important;">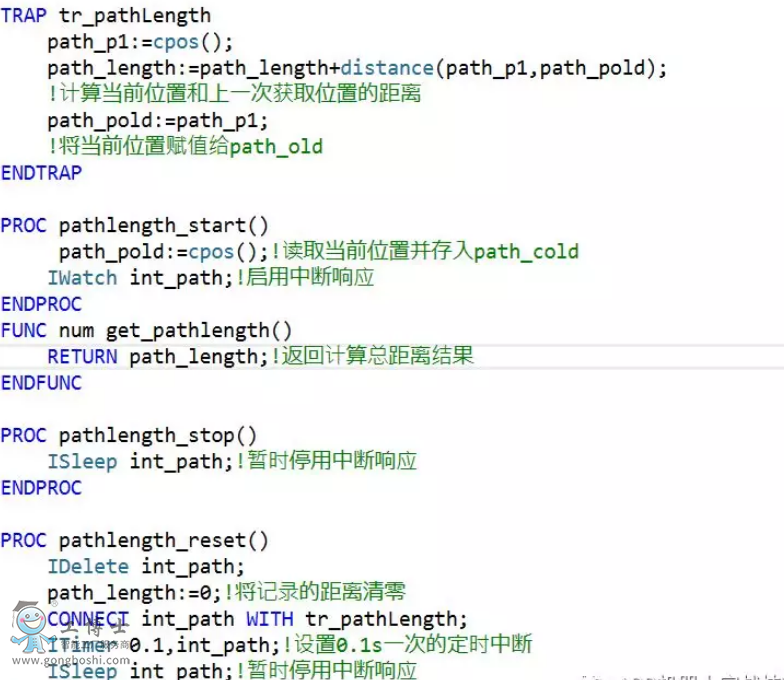
important; overflow-wrap: break-word !important;">3. 在需要使用获取距离的地方插入pathlength_reset(清除距离),pathlength_start(开始获取距离),pathlength_stop(暂停获取距离)等相关指令,并通过get_pathlength函数获取结果。相关指令代码如2中所述。
important; overflow-wrap: break-word !important;">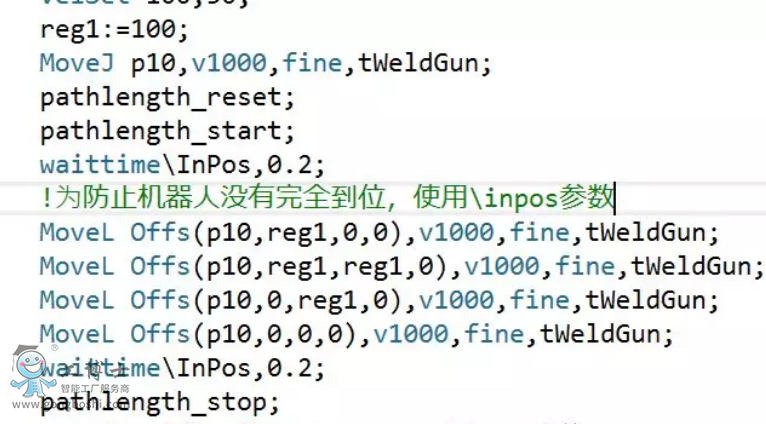

了解更多ABB配件 了解ABB机器人



 QQ
QQ
