

 QQ
QQ

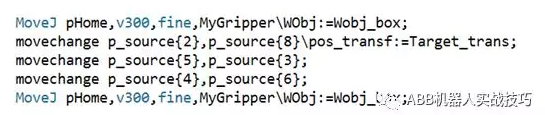
2)实现方法:
A)吸取位置2,放置到过渡点,
从位置8吸取,放置到位置2,
从过渡点吸取,放置到位置8
B)吸取位置5,放置到3
C)吸取位置4,放置到6
3) 可以创建带参数的例行程序,movechange pos1,pos2\pos_transf:=target_transf
其中反斜杠表示可选参数。
即如果选择了可选参数pos_transf,则该指令表示利用target_transf位置,对pos1和pos2互换
如果没有选择反斜杠\pos_trans,则从pos1吸取,放置到pos2
4)对以上逻辑,创建指令如下:
可选参数的选择如下:
点击movechange
点击左下角可选参数,点击use
输入过度位置

创建带参数的例行程序方法见 【原创】创建带参数例行程序
- 下一篇:工业机器人:ABB机器人阻止机器人预读
- 上一篇:工业机器人:ABB机器人程序编辑
